વિકાસ અને ઉત્પાદનનો મેગ્નબેન્ડ ઇતિહાસ
વિચારની ઉત્પત્તિ:
1974 માં મને હાઉસિંગ ઇલેક્ટ્રોનિક પ્રોજેક્ટ્સ માટે બોક્સ બનાવવાની જરૂર હતી.આ કરવા માટે મેં મારી જાતને એંગલ આયર્નના થોડા ટુકડાઓમાંથી એક ખૂબ જ ક્રૂડ શીટમેટલ ફોલ્ડર બનાવ્યું અને તેને વાઇસમાં પકડી રાખ્યું.ઓછામાં ઓછું કહીએ તો તે વાપરવા માટે ખૂબ જ બેડોળ હતું અને બહુમુખી ન હતું.મેં ટૂંક સમયમાં નક્કી કર્યું કે કંઈક સારું કરવાનો સમય આવી ગયો છે.
તેથી મેં 'યોગ્ય' ફોલ્ડર કેવી રીતે બનાવવું તે વિશે વિચાર્યું.એક બાબત જે મને ચિંતિત કરતી હતી તે એ હતી કે ક્લેમ્પિંગ સ્ટ્રક્ચરને મશીનના પાયા સાથે કાં તો છેડે અથવા પાછળના ભાગમાં બાંધવું પડતું હતું અને તે કેટલીક વસ્તુઓ જે હું બનાવવા માંગતો હતો તેના માર્ગમાં આવવાનું હતું.તેથી મેં વિશ્વાસની છલાંગ લગાવી અને કહ્યું...ઠીક છે, ચાલો ક્લેમ્પિંગ સ્ટ્રક્ચરને બેઝ સાથે ન બાંધીએ, હું તે કેવી રીતે કરી શકું?
શું તે જોડાણ તોડવાની કોઈ રીત હતી?
શું તમે કોઈ વસ્તુ સાથે કોઈ વસ્તુ જોડ્યા વિના તેને પકડી રાખી શકો છો?
તે પૂછવા માટે એક હાસ્યાસ્પદ પ્રશ્ન જેવું લાગતું હતું પરંતુ એકવાર મેં તે રીતે પ્રશ્ન ઘડ્યો પછી હું સંભવિત જવાબ સાથે આવ્યો:-
તમે તેમની સાથે ભૌતિક જોડાણ વિના વસ્તુઓને પ્રભાવિત કરી શકો છો... FIELD દ્વારા!
હું ઇલેક્ટ્રિક ક્ષેત્રો*, ગુરુત્વાકર્ષણ ક્ષેત્ર* અને ચુંબકીય ક્ષેત્ર* વિશે જાણતો હતો.પરંતુ તે શક્ય હશે?તે ખરેખર કામ કરશે?
(* એક બાજુએ એ નોંધવું રસપ્રદ છે કે આધુનિક વિજ્ઞાન હજુ સુધી "અંતર પર બળ" વાસ્તવમાં કેવી રીતે કાર્ય કરે છે તે સંપૂર્ણપણે સમજાવવાનું બાકી છે).

પછી શું થયું તે હજુ પણ સ્પષ્ટ સ્મૃતિ છે.
હું મારા હોમ વર્કશોપમાં હતો અને મધ્યરાત્રિ પછી અને સૂવાનો સમય હતો, પરંતુ હું આ નવો વિચાર અજમાવવાની લાલચને રોકી શક્યો નહીં.
મને ટૂંક સમયમાં ઘોડાની નાળનું ચુંબક અને શિમ પિત્તળનો ટુકડો મળ્યો.મેં ચુંબક અને તેના 'કીપર' વચ્ચે શિમ બ્રાસ મૂક્યું અને મારી આંગળી વડે પિત્તળને વાળ્યું!
યુરેકા!તે કામ કર્યું.પિત્તળની જાડાઈ માત્ર 0.09mm હતી પરંતુ સિદ્ધાંત સ્થાપિત થયો હતો!
(ડાબી બાજુનો ફોટો મૂળ પ્રયોગનું પુનઃનિર્માણ છે પરંતુ તે સમાન ઘટકોનો ઉપયોગ કરે છે).
હું ઉત્સાહિત હતો કારણ કે મને શરૂઆતથી જ સમજાયું હતું કે જો આ વિચારને વ્યવહારિક રીતે કામ કરી શકાય તો તે શીટમેટલ કેવી રીતે બનાવવી તે અંગે એક નવો ખ્યાલ રજૂ કરશે.
બીજા દિવસે મેં મારા કામના સાથીદાર ટોની ગ્રેન્જરને મારા વિચારો વિશે જણાવ્યું.તે થોડો ઉત્સાહિત પણ હતો અને તેણે મારા માટે ઇલેક્ટ્રોમેગ્નેટ માટે સંભવિત ડિઝાઇનનું સ્કેચ કર્યું.તેણે વિદ્યુતચુંબકમાંથી કયા પ્રકારના બળો પ્રાપ્ત કરી શકાય તે અંગેની કેટલીક ગણતરીઓ પણ કરી હતી.ટોની સૌથી હોંશિયાર વ્યક્તિ હતો જેને હું જાણતો હતો અને હું ખૂબ ભાગ્યશાળી હતો કે હું તેને એક સાથીદાર તરીકે મળ્યો અને તેની નોંધપાત્ર કુશળતા સુધી પહોંચ્યો.
સારું શરૂઆતમાં એવું લાગતું હતું કે આ વિચાર કદાચ માત્ર શીટમેટલના એકદમ પાતળા ગેજ માટે કામ કરશે પરંતુ તે મને આગળ વધવા માટે પ્રોત્સાહિત કરવા માટે પૂરતું આશાસ્પદ હતું.
પ્રારંભિક વિકાસ:
પછીના થોડા દિવસોમાં મેં સ્ટીલના કેટલાક ટુકડા, તાંબાના તાર અને એક રેક્ટિફાયર મેળવ્યું અને મારું પહેલું ઇલેક્ટ્રો-મેગ્નેટિક ફોલ્ડર બનાવ્યું!મારી પાસે તે હજી પણ મારા વર્કશોપમાં છે:

આ મશીનનો ઇલેક્ટ્રો-મેગ્નેટ ભાગ અસલી અસલ છે.
(અહીં બતાવેલ આગળનો ધ્રુવ અને બેન્ડિંગ બીમ પાછળથી ફેરફાર કરવામાં આવ્યા હતા).
તેના બદલે ક્રૂડ હોવા છતાં આ મશીન કામ કરે છે!
મારા મૂળ યુરેકા ક્ષણમાં કલ્પના કર્યા મુજબ, ખરેખર ક્લેમ્પિંગ બારને મશીનના પાયા સાથે છેડે, પાછળ અથવા ક્યાંય પણ જોડવાની જરૂર નહોતી.આમ મશીન સંપૂર્ણપણે ખુલ્લું અને ખુલ્લા ગળાનું હતું.
પરંતુ ઓપન-એન્ડેડ પાસું ફક્ત ત્યારે જ સંપૂર્ણ રીતે સાકાર થઈ શકે છે જો બેન્ડિંગ બીમ માટેના હિન્જ્સ પણ થોડી બિનપરંપરાગત હોય.
આવતા મહિનાઓમાં મેં એક પ્રકારના હાફ-હિંગ પર કામ કર્યું જેને મેં 'કપ-હિંગ' કહેલું, મેં વધુ સારું પ્રદર્શન કરતું મશીન (માર્ક II) બનાવ્યું, મેં ઑસ્ટ્રેલિયન પેટન્ટ ઑફિસમાં પ્રોવિઝનલ પેટન્ટ સ્પેસિફિકેશન નોંધાવ્યું અને હું તેના પર પણ દેખાયો. "ધ ઇન્વેન્ટર્સ" નામનો ABC ટેલિવિઝન પ્રોગ્રામ.મારી શોધને તે અઠવાડિયા માટે વિજેતા તરીકે પસંદ કરવામાં આવી હતી અને પછીથી તે વર્ષ (1975) માટે ફાઇનલિસ્ટમાંથી એક તરીકે પસંદ કરવામાં આવી હતી.

ડાબી બાજુએ માર્ક II બેન્ડર છે જેનું નિદર્શન સિડનીમાં ધ ઈન્વેન્ટર્સની ફાઇનલમાં દેખાયા પછી થયું હતું.
તે નીચે બતાવ્યા પ્રમાણે 'કપ હિન્જ'ના વધુ વિકસિત સંસ્કરણનો ઉપયોગ કરે છે:

1975 દરમિયાન હું હોબાર્ટમાં ઈન્વેન્ટર્સ એસોસિએશનની મીટિંગમાં જ્યોફ ફેન્ટનને મળ્યો (3 ઓગસ્ટ 1975).જ્યોફને "મેગ્નાબેન્ડ" શોધમાં ઘણો રસ હતો અને તેને નજીકથી જોવા માટે મીટિંગ પછી મારા સ્થાને પાછો આવ્યો.આ જ્યોફ સાથેની સ્થાયી મિત્રતાની શરૂઆત અને બાદમાં વ્યવસાયિક ભાગીદારી થવાની હતી.
જ્યોફ એન્જિનિયરિંગ સ્નાતક હતા અને પોતે ખૂબ જ હોંશિયાર શોધક હતા.તેણે એક મિજાગરું ડિઝાઇન રાખવાનું મહત્વ સહેલાઈથી જોયું જે મશીનને તેની સંપૂર્ણ ઓપન-એન્ડેડ સંભવિતતાને સમજવાની મંજૂરી આપશે.
મારા 'કપ હિન્જ' એ કામ કર્યું પરંતુ 90 ડિગ્રીથી વધુ બીમ એંગલ માટે ગંભીર સમસ્યાઓ હતી.
જ્યોફને સેન્ટરલેસ હિન્જ્સમાં ખૂબ રસ પડ્યો.મિજાગરુંનો આ વર્ગ વર્ચ્યુઅલ પોઈન્ટની આસપાસ પિવોટિંગ પ્રદાન કરી શકે છે જે સંપૂર્ણપણે મિજાગરું મિકેનિઝમની બહાર હોઈ શકે છે.
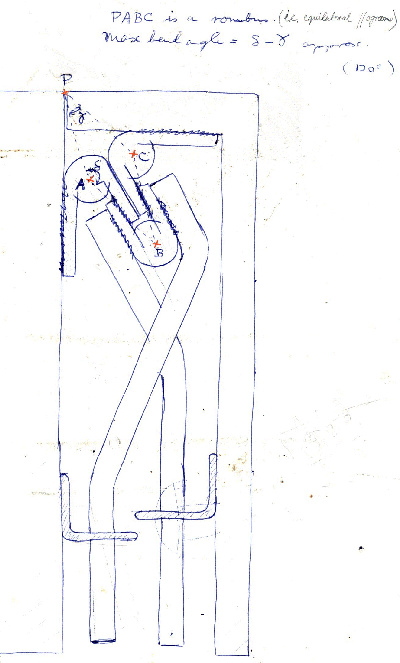
એક દિવસ (1 ફેબ્રુઆરી 1976) જ્યોફ અસામાન્ય અને નવીન દેખાતી મિજાગરાની ડ્રોઇંગ સાથે આવ્યો.હું આશ્ચર્યચકિત થઈ ગયો!મેં આના જેવું દૂરથી ક્યારેય જોયું ન હતું!
(ડાબી બાજુએ ચિત્ર જુઓ).
મેં શીખ્યા કે આ એક સંશોધિત પેન્ટોગ્રાફ મિકેનિઝમ છે જેમાં 4-બાર જોડાણો સામેલ છે.અમે વાસ્તવમાં ક્યારેય આ હિન્જનું યોગ્ય સંસ્કરણ બનાવ્યું નથી પરંતુ થોડા મહિનાઓ પછી જ્યોફ એક સુધારેલ સંસ્કરણ સાથે આવ્યા જે અમે બનાવ્યું હતું.
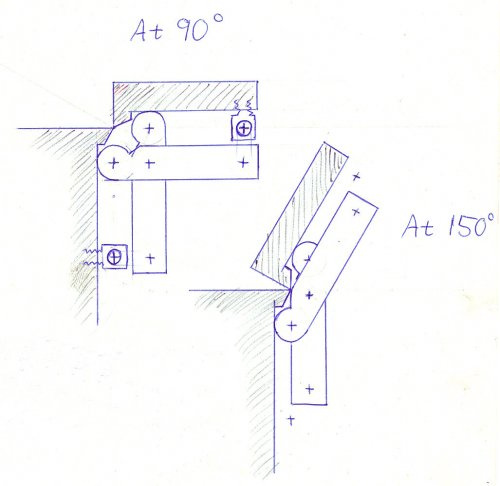
સુધારેલ સંસ્કરણનો ક્રોસ વિભાગ નીચે બતાવેલ છે:
આ મિજાગરીના 'બાહુઓ'ને નાના ક્રેન્ક દ્વારા મુખ્ય ધરી સભ્યોની સમાંતર રાખવામાં આવે છે.આ નીચેના ફોટામાં જોઈ શકાય છે.ક્રેન્ક્સને કુલ હિન્જ લોડની માત્ર થોડી ટકાવારી લેવાની હોય છે.
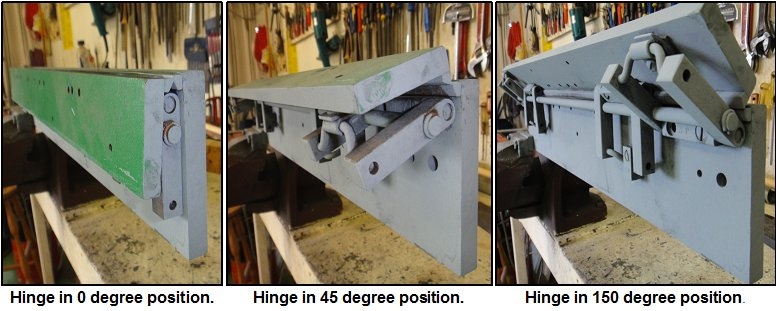
આ મિકેનિઝમનું સિમ્યુલેશન નીચેની વિડિઓમાં બતાવવામાં આવ્યું છે.(આ સિમ્યુલેશન માટે ડેનિસ એસ્પોનો આભાર).
https://youtu.be/wKxGH8nq-tM
જો કે આ મિજાગરું મિકેનિઝમ ખૂબ સારી રીતે કામ કરતું હતું, તે વાસ્તવિક મેગ્નાબેન્ડ મશીન પર ક્યારેય ઇન્સ્ટોલ થયું ન હતું.તેની ખામીઓ એ હતી કે તે બેન્ડિંગ બીમના સંપૂર્ણ 180 ડિગ્રી પરિભ્રમણ માટે પ્રદાન કરતું ન હતું અને તે પણ તેમાં ઘણા બધા ભાગો હોય તેવું લાગતું હતું (જોકે ઘણા ભાગો એકબીજા જેવા જ હતા).
આ હિન્જનો ઉપયોગ ન થવાનું બીજું કારણ એ હતું કે જ્યોફ પછી તેની સાથે આવ્યા:
ત્રિઅક્ષીય હિન્જ:
ત્રિઅક્ષીય મિજાગરું સંપૂર્ણ 180 ડિગ્રી પરિભ્રમણ પૂરું પાડતું હતું અને તે સરળ હતું કારણ કે તેને ઓછા ભાગોની જરૂર હતી, જોકે ભાગો પોતે વધુ જટિલ હતા.
એકદમ સ્થાયી ડિઝાઇન સુધી પહોંચતા પહેલા ત્રિઅક્ષીય મિજાગરું ઘણા તબક્કાઓમાંથી પસાર થયું હતું.અમે વિવિધ પ્રકારોને ધ ટ્રુનિઅન હિન્જ, ધ સ્ફેરિકલ ઈન્ટરનલ હિન્જ અને ધ સ્ફેરિકલ એક્સટર્નલ હિન્જ કહીએ છીએ.
ગોળાકાર બાહ્ય મિજાગરું નીચેની વિડિયોમાં સિમ્યુલેટેડ છે (આ સિમ્યુલેશન માટે જેસન વોલિસનો આભાર):
https://youtu.be/t0yL4qIwyYU
આ તમામ ડિઝાઇનનું વર્ણન યુએસ પેટન્ટ સ્પેસિફિકેશન દસ્તાવેજમાં કરવામાં આવ્યું છે.(PDF).
મેગ્નાબેન્ડ મિજાગરાની સૌથી મોટી સમસ્યા એ હતી કે તેને મૂકવા માટે ક્યાંય નહોતું!
મશીનના છેડા બહાર છે કારણ કે અમે મશીનને ઓપન-એન્ડેડ જોઈએ છે, તેથી તેને બીજે ક્યાંક જવું પડશે.બેન્ડિંગ બીમના આંતરિક ચહેરા અને ચુંબકના આગળના ધ્રુવના બાહ્ય ચહેરા વચ્ચે ખરેખર કોઈ જગ્યા નથી.
જગ્યા બનાવવા માટે આપણે બેન્ડિંગ બીમ અને આગળના ધ્રુવ પર હોઠ આપી શકીએ છીએ પરંતુ આ હોઠ બેન્ડિંગ બીમની મજબૂતાઈ અને ચુંબકના ક્લેમ્પિંગ ફોર્સ સાથે સમાધાન કરે છે.(ઉપરના પેન્ટોગ્રાફ હિન્જના ફોટામાં તમે આ હોઠ જોઈ શકો છો).
આમ, મિજાગરીની ડિઝાઇન પાતળા થવાની જરૂરિયાત વચ્ચે મર્યાદિત છે જેથી માત્ર નાના હોઠની જરૂર પડશે અને જાડા હોવા જરૂરી છે જેથી તે પર્યાપ્ત મજબૂત બને.અને વર્ચ્યુઅલ પીવટ પ્રદાન કરવા માટે કેન્દ્રવિહીન હોવું જરૂરી છે, પ્રાધાન્ય ચુંબકની કાર્ય સપાટીની ઉપર.
આ આવશ્યકતાઓ ખૂબ ઊંચા ઓર્ડર જેટલી હતી, પરંતુ જ્યોફની ખૂબ જ સંશોધનાત્મક રચનાએ જરૂરિયાતોને સારી રીતે સંબોધિત કરી હતી, જો કે શ્રેષ્ઠ સમાધાન શોધવા માટે ઘણા બધા વિકાસ કાર્ય (ઓછામાં ઓછા 10 વર્ષ સુધી વિસ્તરણ)ની જરૂર હતી.
જો વિનંતી કરવામાં આવે તો હું હિન્જ્સ અને તેમના વિકાસ પર એક અલગ લેખ લખી શકું છું પરંતુ હમણાં માટે અમે ઇતિહાસ પર પાછા ફરીશું:
ઉત્પાદન-અંડર-લાઈસન્સ કરારો:
આગામી વર્ષોમાં અમે સંખ્યાબંધ "ઉત્પાદન-અંડર-લાઈસન્સ" કરારો પર હસ્તાક્ષર કર્યા:
6 ફેબ્રુઆરી 1976: નોવા મશીનરી Pty લિમિટેડ, ઓસ્બોર્ન પાર્ક, પર્થ વેસ્ટર્ન ઓસ્ટ્રેલિયા.
31 ડિસેમ્બર 1982: થલમેન કન્સ્ટ્રક્શન્સ એજી, ફ્રેઉનફેલ્ડ, સ્વિટ્ઝર્લેન્ડ.
12 ઓક્ટોબર 1983: રોપર વ્હીટની કો, રોકફોર્ડ, ઇલિનોઇસ, યુએસએ.
ડિસેમ્બર 1, 1983: જોર્ગ મશીન ફેક્ટરી, એમર્સફોર્ટ, હોલેન્ડ
(જો કોઈ રસ ધરાવતા પક્ષ દ્વારા વિનંતી કરવામાં આવે તો વધુ ઇતિહાસ).